Monat: Oktober 2009
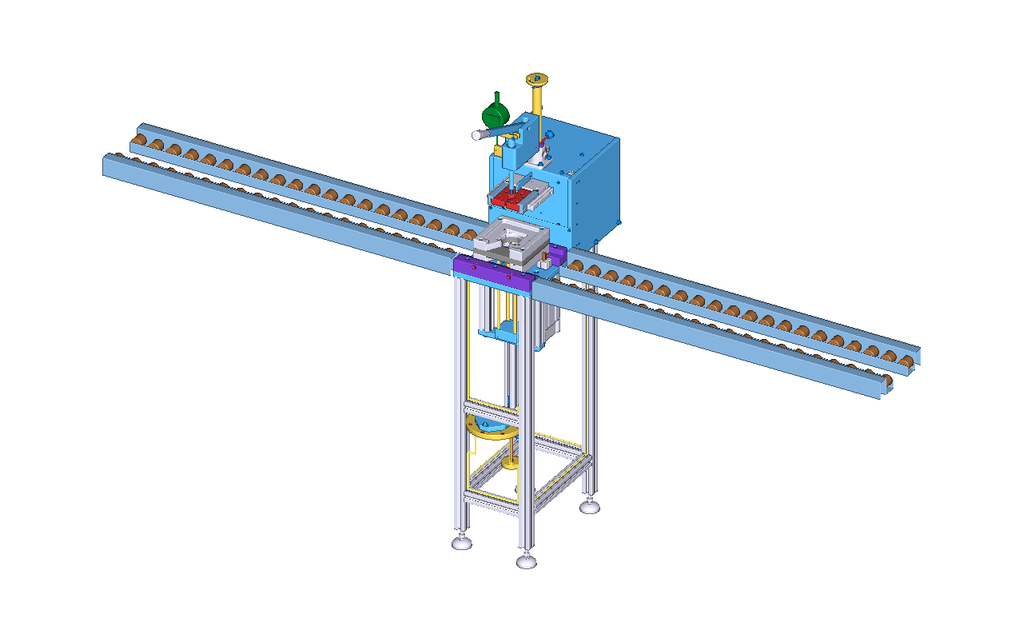
Transfersystem mit Werkstückträgern zwischen Montagestationen
Die einzelnen Stationen einer v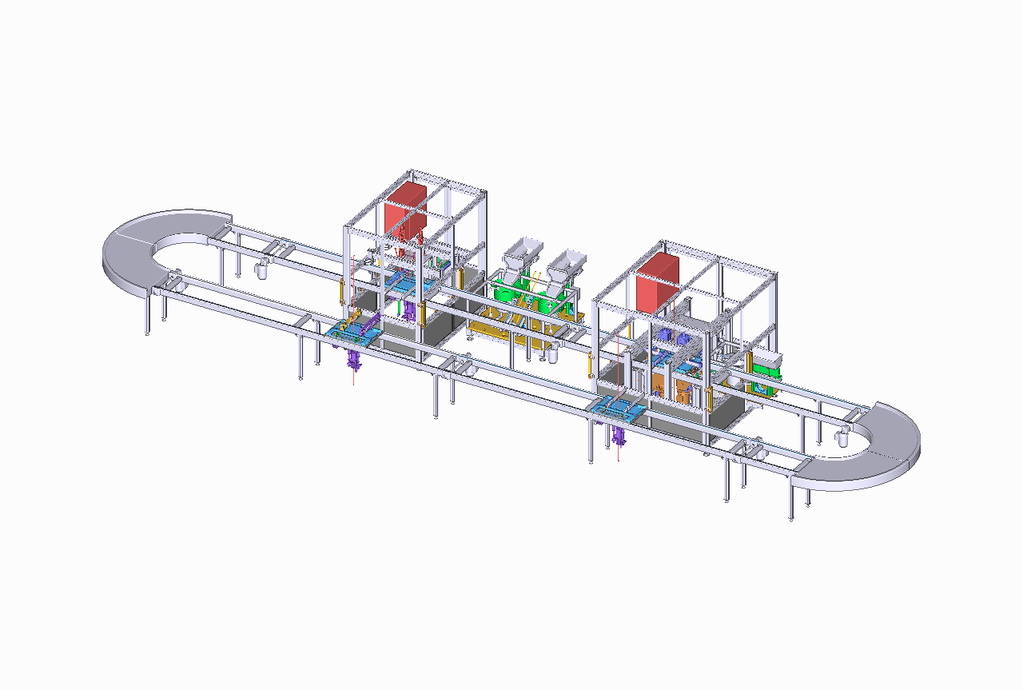 ollautomatischen Lösung zur Montage von Blechteilen sind untereinander mit einem Transfersystem verbunden, das die Blechteile auf Werkstückträgern zwischen den beiden Stationen und den Handarbeitspätzen für Bestücken und Verpacken transportiert.
ollautomatischen Lösung zur Montage von Blechteilen sind untereinander mit einem Transfersystem verbunden, das die Blechteile auf Werkstückträgern zwischen den beiden Stationen und den Handarbeitspätzen für Bestücken und Verpacken transportiert.
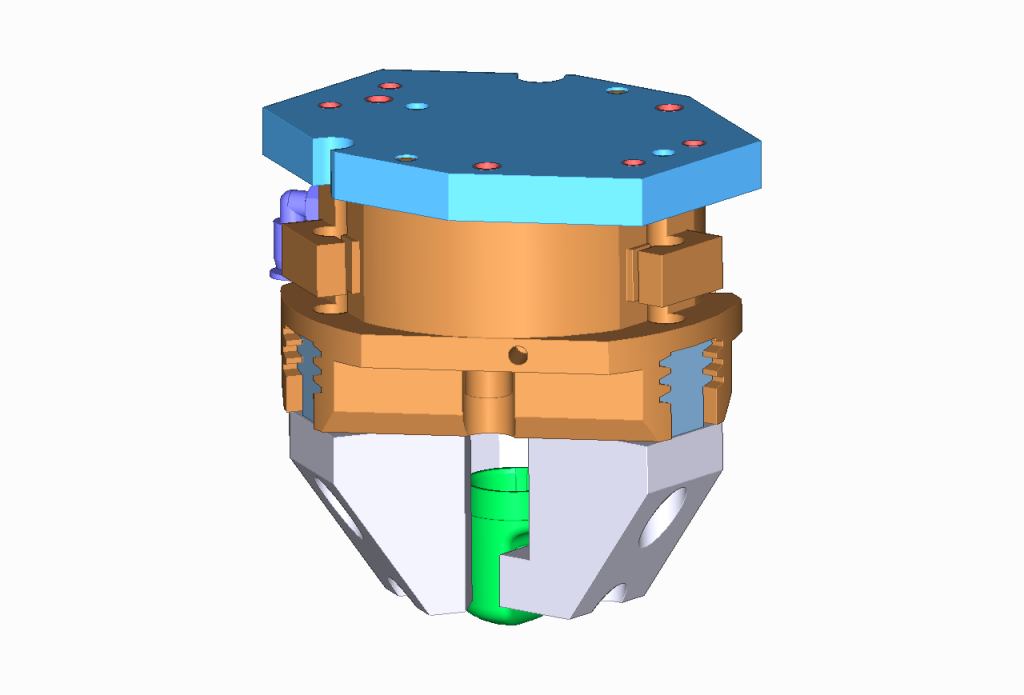
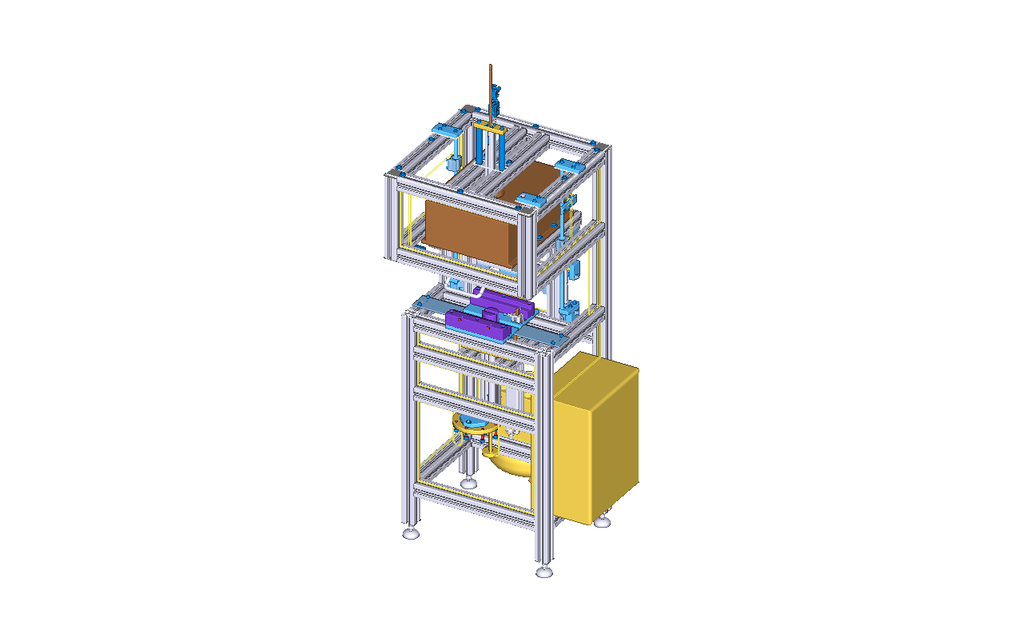
Entnahmehandling mit Sechsachs-roboter für Spritzgussmaschine
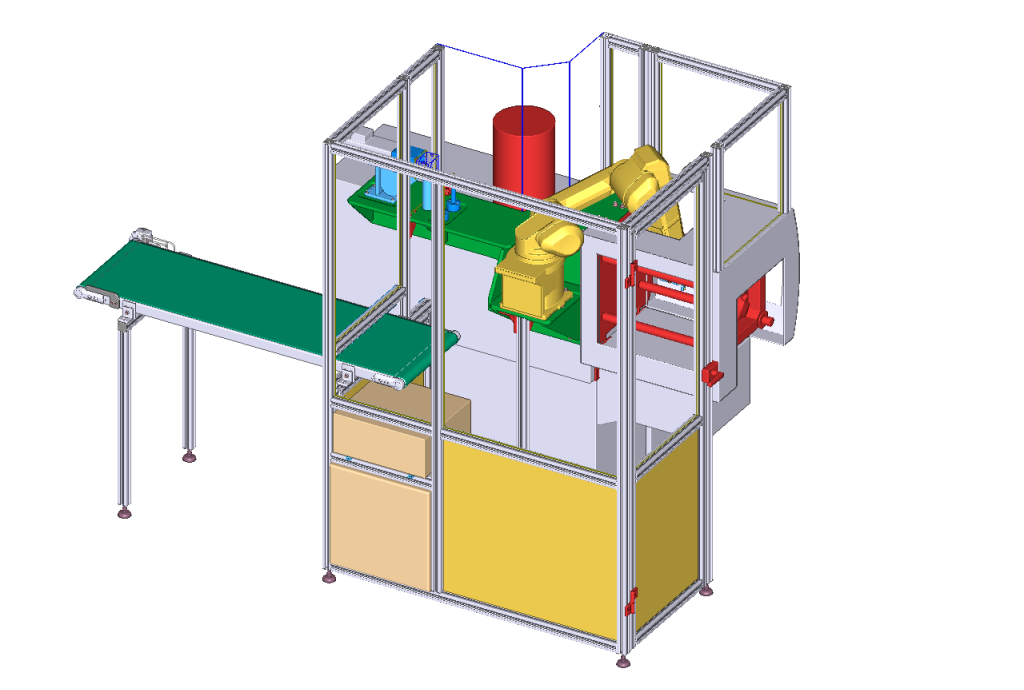 Empfindliche Spritzgussteile dürfen beim Öffnen der Spritzgussform nicht einfach ausgestoßen und fallen gelassen werden, da sie sonst beschädigt werden würden. Sie müssen definiert aus der Form entnommen werden.
Empfindliche Spritzgussteile dürfen beim Öffnen der Spritzgussform nicht einfach ausgestoßen und fallen gelassen werden, da sie sonst beschädigt werden würden. Sie müssen definiert aus der Form entnommen werden.
Um dies zu automatisieren kommt ein Sechsachsroboter mit Doppelgreifer zum Einsatz.
- Entnehmen des Spritzgussteiles aus der Form mit einem Miniaturgreifer
- Absetzen auf einer Abkühlposition
- Erneutes Greifen des Teiles mit dem anderen Greifer
- Abfräsen des Angusses
- Ablegen des Teiles auf ein Förderband
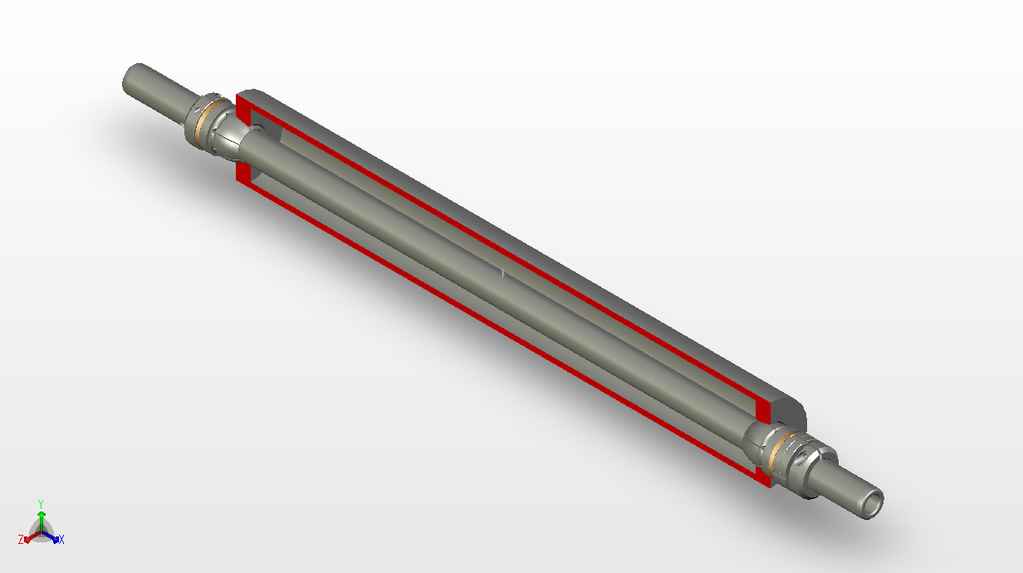
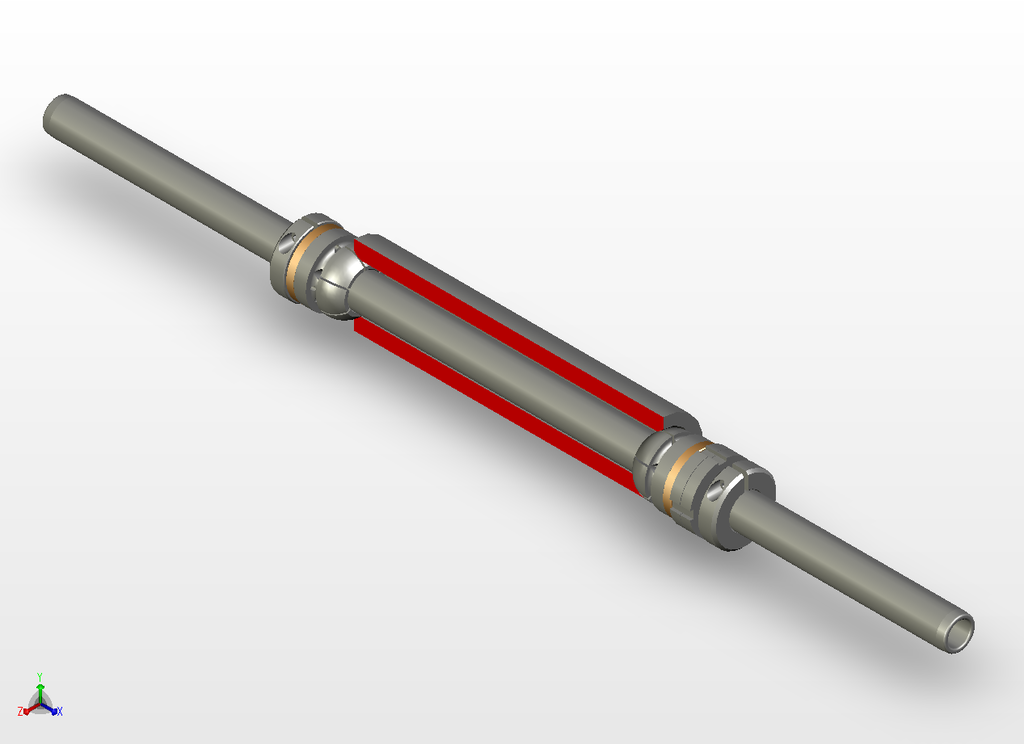
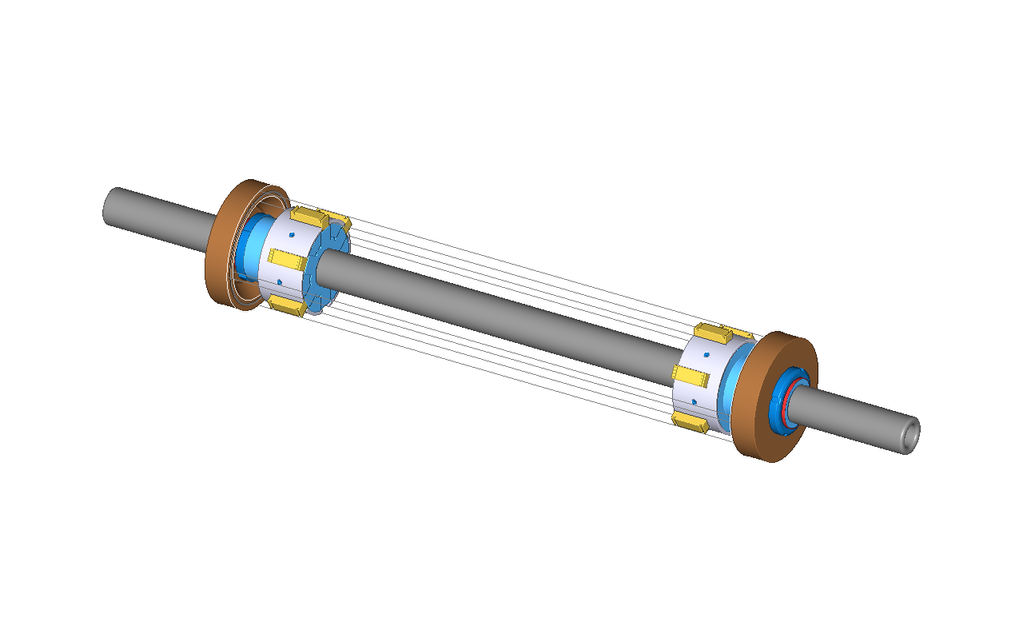
Spannwellen für die Druckzylinderherstellung
Formträger für PUR-Formen
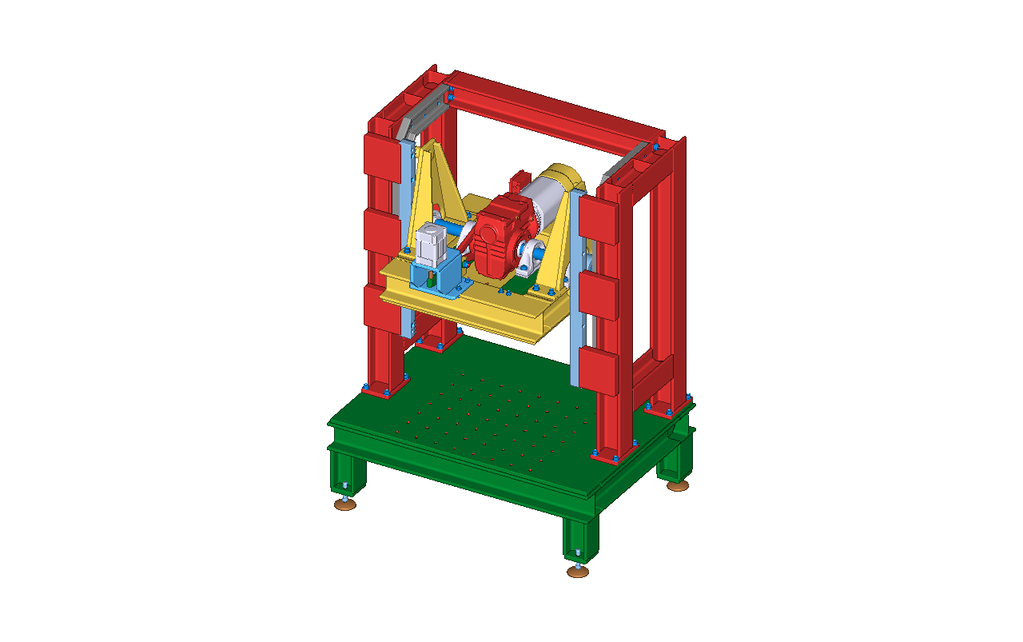
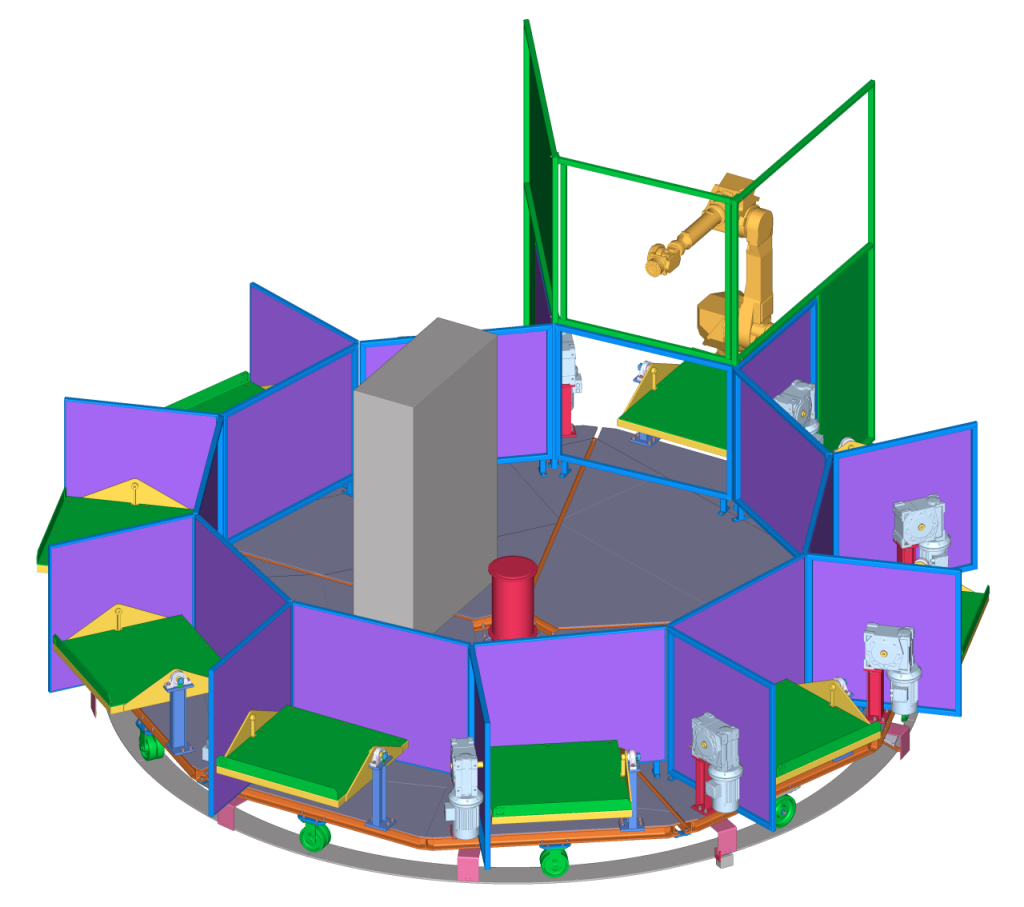
Rundschaltanlage mit Lackierroboter und zehn Stationen für PUR-Formen
Magnetisierautomat für Schrittmotoren
Presstisch zum Verkleben von Styroporteilen klein
 Ein Presstisch wie hier beschrieben, jedoch in einfacherer Ausführung und kleiner.
Ein Presstisch wie hier beschrieben, jedoch in einfacherer Ausführung und kleiner.

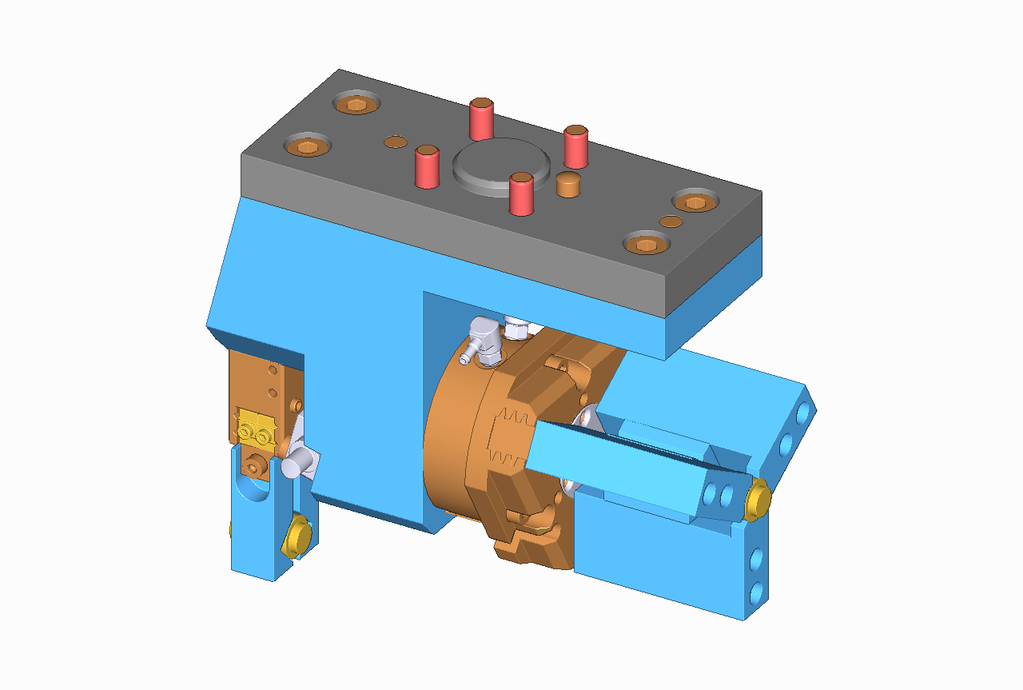
Pneumatische Presse und Schraubvorrichtung zur Montage des Gehäuses eines Schrittmotors
 In einer manuellen Fertigungslinie für Schrittmotoren müssen hinteres und vorderes Lagerschild mit dem Stator verschraubt werden. Die Lagerschilde mit sind mit O-Ringen abgedichtet und benötigen deshalb einen hohe Montagekraft.
In einer manuellen Fertigungslinie für Schrittmotoren müssen hinteres und vorderes Lagerschild mit dem Stator verschraubt werden. Die Lagerschilde mit sind mit O-Ringen abgedichtet und benötigen deshalb einen hohe Montagekraft.
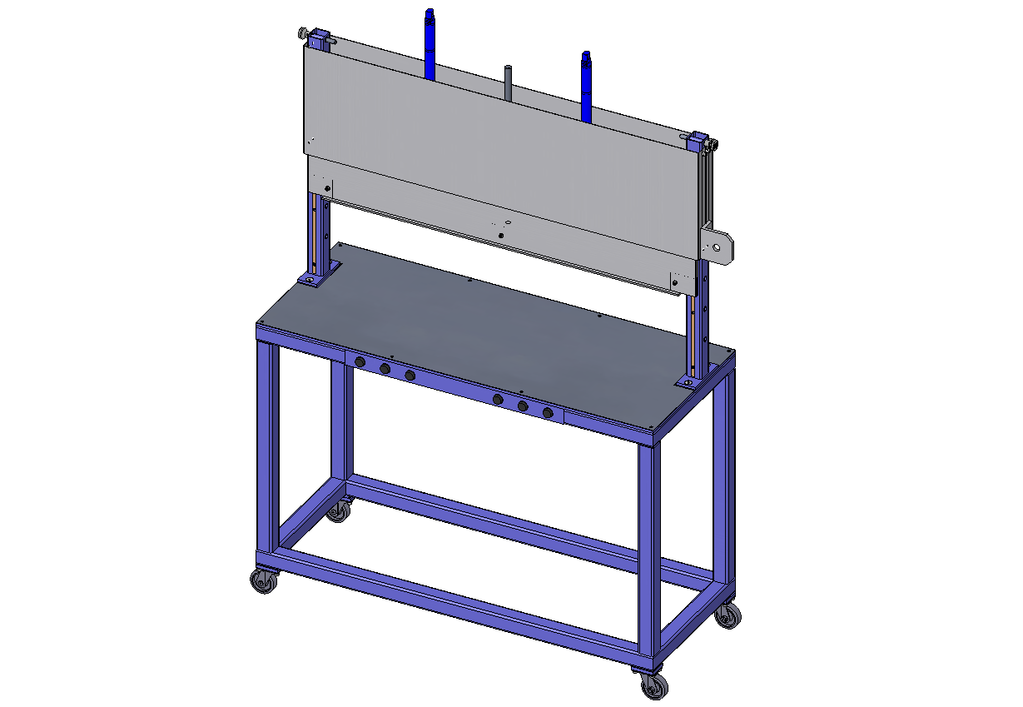
Vorrichtung zum Auftragen von Dichtband
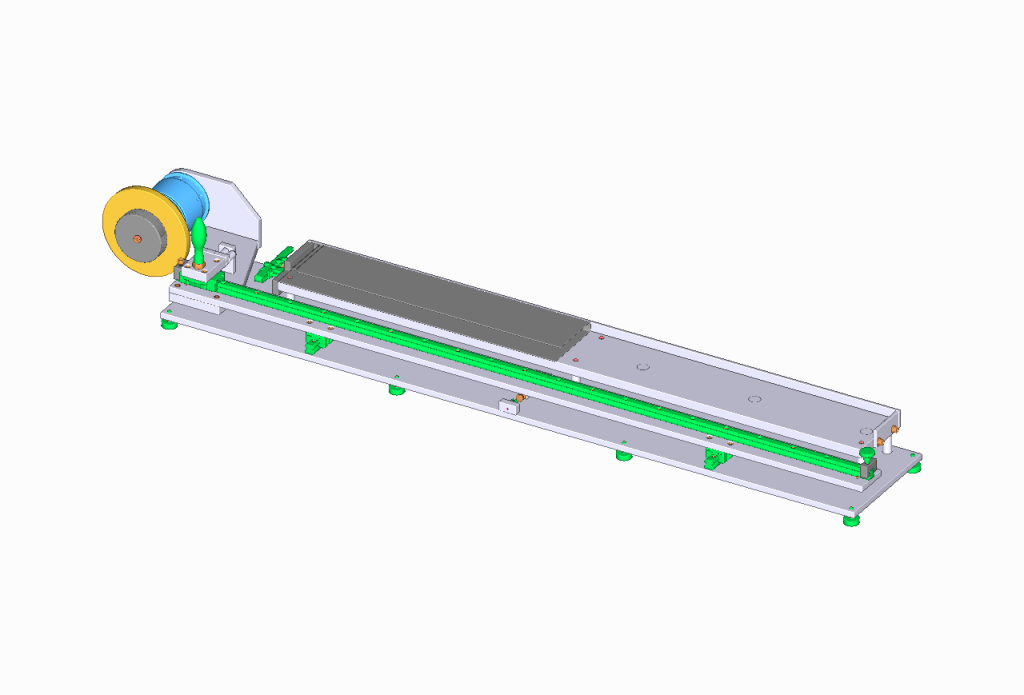 Ein selbstklebendes Dichtband soll beidseitig innen in ein U-förmig gekantetes Blech aufgebracht werden. Ausschließlich von Hand ist das fast nicht machbar. Die Vorrichtung unterstützt das händische Aufbringen, indem sie das Band über Rollen einzieht und mit einer Bremse auf Spannung hält.
Ein selbstklebendes Dichtband soll beidseitig innen in ein U-förmig gekantetes Blech aufgebracht werden. Ausschließlich von Hand ist das fast nicht machbar. Die Vorrichtung unterstützt das händische Aufbringen, indem sie das Band über Rollen einzieht und mit einer Bremse auf Spannung hält.